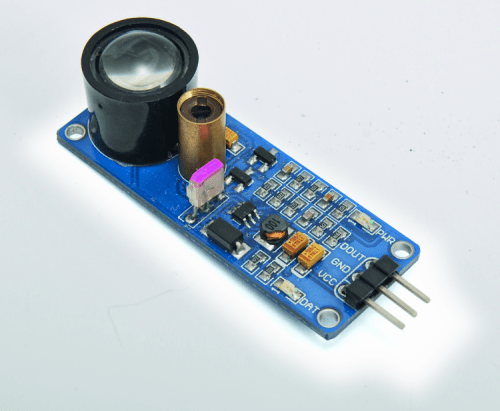
该电路通过激光二极管发射光束和光敏晶体管检测反射光,实现对物体存在及经过的检测。
在机器人应用和工业控制系统中,通常使用光学系统来探测物体的接近和经过,通过光束中断或物体表面对光线的反射来实现检测。本文旨在展示一个激光屏障的搭建方法。不过,这并不是一种中断型屏障(需要物体经过时触发),而是一种反射型屏障。
在该电路中,激光发射出聚焦且几乎平行的光束。当有物体经过时,一部分光被反射,并通过透镜被截获。光线随后聚焦到光敏元件的感光表面。因此,在这种屏障中,物体的存在会将光线引导到光电探测器上。这类装置的一个优点是无需在远处安装传感器,所有电子元件集中在一个位置,非常适合移动系统使用,非常适合机器人。
典型检测距离为 80 厘米,但在理想条件下可达 1.5 米;具体取决于光线强度和物体对光的吸收,即物体表面的反射光量。由于电路的设计特点,它可用于障碍物检测。
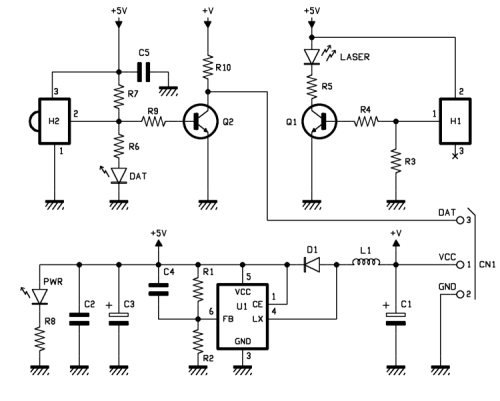
激光障碍物检测器电路图
来源:open-electronics.org | 知识共享许可(CC BY-NC-SA 4.0)