Commande simple d’un servo-moteur (NE555)
Comment piloter de manière simple un servo-moteur ?
En faisant appel à un NE555, bien évidemment !
Le circuit
Prenons l’exemple de l’automatisation d’une barrière à l’aide d’un servo-moteur nécessitant deux positions distinctes. Pour réaliser cette fonctionnalité, le schéma ci-dessous propose une solution élégante. En fonction de la tension appliquée à V2, qui peut varier entre 0V et +5V, le servo-moteur est positionné à deux angles prédéfinis. Ces angles peuvent être ajustés grâce à des résistances, offrant ainsi une flexibilité dans le contrôle des positions de la barrière. Cette approche simplifiée permet une mise en œuvre efficace et économique de systèmes d’automatisation pour des applications telles que les portails, les barrières de parking ou les portes automatiques, offrant ainsi une solution pratique et adaptable pour répondre aux besoins spécifiques de contrôle de position.
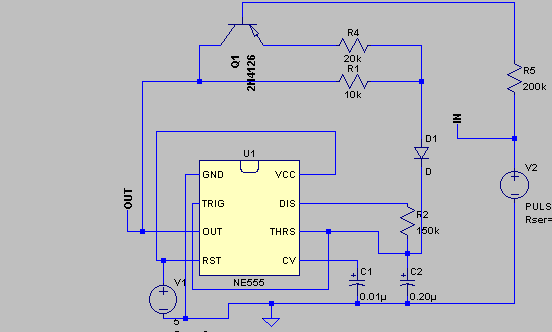
Dans ce schéma, la source de tension V1 représente l’alimentation principale du circuit. Quant à la source de tension V2, elle symbolise le signal d’entrée contrôlant la position de la barrière : 0V correspond à la position ouverte, tandis que 5V indiquent la position fermée (ou vice versa). Le transistor Q1, un modèle PNP tel que le BC558, agit comme un commutateur contrôlé par le signal d’entrée. L’élément clé de ce circuit est la sortie ‘OUT’, qui génère le signal de commande du servo-moteur. Les résistances de 10k et 20k offrent un moyen de régler avec précision les deux positions du servo, permettant ainsi une adaptation facile à différentes configurations et applications.
Comment ça marche ?
Le 555 oscille en chargeant, puis déchargeant, puis rechargeant, etc… un condensateur. (ici, C2)
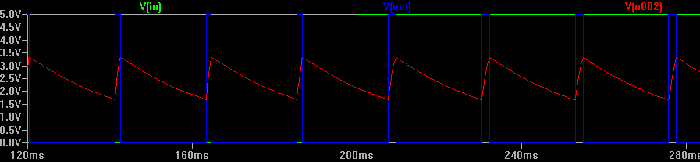
Le processus de décharge du condensateur C2 est essentiel pour déterminer la durée pendant laquelle la sortie reste à l’état bas. Cette décharge est réalisée à travers la résistance R2, dont la valeur de 150k? permet d’obtenir un temps d’approximativement 20 millisecondes. Pendant cette période, la sortie reste maintenue à l’état bas, ce qui correspond à une des positions désirées pour le servo-moteur.
En revanche, le processus de charge du condensateur C2 dépend de la configuration de résistances R1 et R4, ainsi que de la diode D1. Lorsque le transistor est passant, C2 se charge à travers R4 et R1, ce qui prend environ 1 milliseconde. Cependant, lorsque le transistor est bloquant, la charge de C2 ne se fait qu’à travers R1, ce qui prolonge la durée de charge à environ 1.5 milliseconde. Ces valeurs, bien que approximatives, fournissent un ordre de grandeur utile pour ajuster les résistances R1 et R4 afin d’obtenir les positions désirées pour le servo-moteur de manière plus précise.
Source: planete-sciences.org | CC