Construire un détecteur d’obstacle laser
Ce montage nous permet de détecter la présence et le passage d’un objet grâce à la combinaison d’une diode laser émettant un rayon lumineux et d’un phototransistor qui détecte la lumière réfléchie.
Les applications robotiques et les systèmes de contrôle industriels utilisent généralement des systèmes optiques pour détecter la proximité et le passage d’objets, en tirant parti des interruptions lumineuses ou de la réflexion de la lumière sur une surface de l’objet à détecter. Dans cet article, nous souhaitons vous montrer le montage d’une barrière laser. Il ne s’agit toutefois pas d’une barrière de type interruption, qui nécessite que l’objet soit détecté au passage, c’est en fait une barrière de réflexion.
Dans ce montage, un laser projette un rayon de lumière focalisée et infiniment collimatée. Si un objet passe, une partie du Fux serait refléter et intercepter par une lentille. La lumière serait focalisée sur la surface sensible d’un composant photosensible. Par conséquent, dans cette barrière, l’objet a détecté diriger la lumière vers un photodétecteur. L’un des avantages de ce type d’appareils est qu’il ne nécessite pas la pose d’un capteur à distance. En fait, il concentre toute l’électronique nécessaire à un seul endroit et est donc idéal pour les systèmes mobiles. Ce système convient bien pour les robots. La distance de détection typique est de 80 cm mais il peut atteindre un maximum de 1,5 m; tout dépend de la lumière et de l’absorption de l’objet, autrement dit de la quantité de lumière réfléchie par sa surface. Le circuit, grâce à sa nature, peut être utilisé pour détecter les obstacles.
Schéma détecteur d’obstacle laser
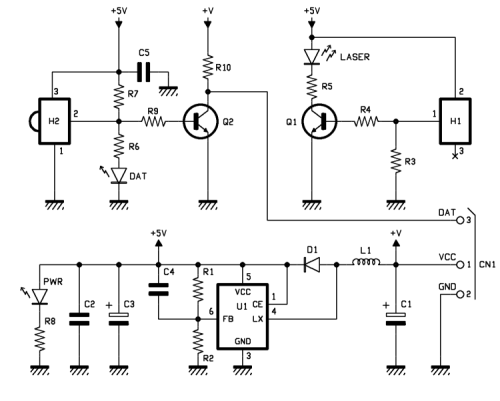
Source: open-electronics.org | Creative Commons (CC BY-NC-SA 4.0)