Détecteur d’obstacle pour voiture téléguidée
La détection d’obstacles est une fonctionnalité essentielle dans les systèmes électroniques embarqués et les projets de robotique tels que les voitures téléguidées et les robots autonomes. Un détecteur d’obstacles permet à un circuit ou à un microcontrôleur de percevoir la présence d’un objet dans son environnement immédiat sans contact physique direct. Cela permet de déclencher des actions telles que l’arrêt du véhicule, le signalement d’un obstacle ou l’activation d’un avertissement visuel ou sonore. Le schéma de détection d’obstacles pour voiture téléguidée utilise des diodes infrarouges émettrices et des phototransistors récepteurs pour mesurer la réflexion de signaux lumineux infrarouges sur des objets proches afin de détecter leur présence. Ce type de montage est très répandu dans les projets de robotique éducative, les véhicules télécommandés et les systèmes d’évitement d’obstacles pour microcontrôleurs tels que PIC, Arduino ou ESP32.
Description du schéma électronique de détection d’obstacles
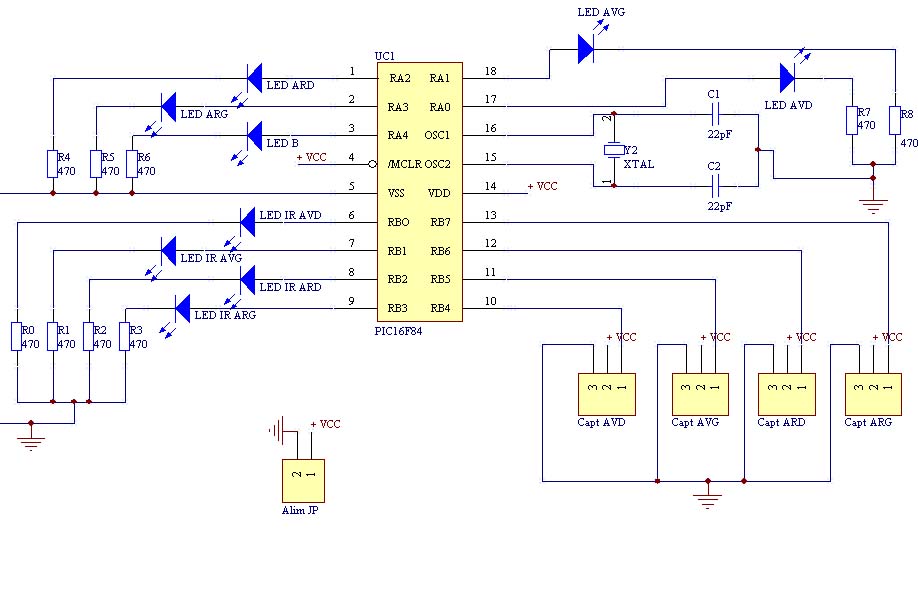
Le schéma de détection d’obstacles utilise un microcontrôleur 8 bits, typiquement un PIC16F84, programmé pour scanner en permanence les capteurs à infrarouge et analyser les signaux reçus. Le microcontrôleur fonctionne avec un quartz oscillant à 4 MHz, ce qui permet un traitement rapide et précis des signaux. Plusieurs diodes infrarouges envoient un faisceau lumineux invisible vers l’avant du véhicule. Lorsqu’un obstacle se trouve sur le trajet de ce faisceau, la lumière est réfléchie vers les phototransistors qui la convertissent en signal électrique. Le microcontrôleur analyse ensuite ces signaux pour déterminer si un obstacle est présent et déclenche la réaction appropriée, comme l’allumage d’une LED de signalisation ou la modification de l’état des moteurs. Le principe repose sur la réflexion de la lumière infrarouge pour détecter la présence d’objets. Ce système n’a pas vocation à mesurer une distance précise mais fournit une indication fiable de la présence d’obstacles dans la zone de détection définie par l’orientation et la sensibilité des capteurs.
Fonctionnement détaillé des composants du circuit
Le composant central du montage est le microcontrôleur qui combine un processeur, de la mémoire et des ports d’entrée/sortie. Il surveille en permanence l’état des phototransistors et réagit dès qu’un signal indique la présence d’un obstacle. Les diodes infrarouges émettent continuellement de la lumière dans la direction de déplacement du véhicule, et les phototransistors captent la lumière réfléchie par les objets. Ces modules infrarouges nécessitent généralement une alimentation stable comprise entre 3,3 V et 5 V. La portée typique de détection des capteurs infrarouges varie de 2 cm à environ 30 cm, ce qui est suffisant pour les voitures téléguidées et les robots éducatifs. Ce type de circuit est idéal pour détecter des obstacles à faible vitesse et dans des environnements domestiques ou éducatifs.
Programmation et traitement des signaux
La programmation du microcontrôleur est cruciale pour la réussite du détecteur d’obstacles. Le microcontrôleur doit scanner les capteurs à intervalles réguliers, interpréter les signaux électriques reçus et décider si une action est nécessaire. Lorsqu’au moins un capteur indique la présence d’un obstacle, le microcontrôleur peut allumer une LED ou modifier l’état des moteurs de la voiture téléguidée. La vitesse de lecture doit être suffisamment rapide pour permettre une réaction en temps réel lors du déplacement du véhicule. Cette logique de contrôle est implémentée dans le code du microcontrôleur et assure la sécurité et l’efficacité du système.
Applications pratiques du schéma
Un schéma de détection d’obstacles comme celui présenté est utile dans de nombreux contextes. Dans les voitures téléguidées, il permet d’éviter les collisions et d’améliorer l’expérience utilisateur. Dans les projets éducatifs, il sert à enseigner les bases de l’électronique et de la programmation de microcontrôleurs. Dans des systèmes de surveillance ou de sécurité domestique, ce type de circuit peut alerter de la présence d’objets ou de personnes. Il peut également être intégré dans des projets robotiques ou domotiques pour créer des systèmes de contrôle ou de mesure simple.
Avantages du système de détection infrarouge
L’un des principaux avantages de ce montage est sa simplicité et sa faible consommation énergétique. Les capteurs infrarouges et le microcontrôleur peuvent fonctionner avec une batterie standard de 3,7 V à 5 V pendant plusieurs heures. La détection est rapide, fiable et ne nécessite pas de contact physique avec l’obstacle. Ce type de circuit est également très compact et peut être intégré facilement dans des projets électroniques de petite taille. La combinaison de diodes infrarouges, de phototransistors et de microcontrôleur assure un fonctionnement stable et précis même dans des environnements variés.
Conclusion
Le schéma électronique de détection d’obstacles pour voiture téléguidée constitue une solution pratique et efficace pour la détection d’objets à proximité immédiate. Grâce à l’utilisation de diodes infrarouges et de phototransistors couplés à un microcontrôleur, il est possible de concevoir un système intelligent capable de réagir rapidement aux obstacles. Ce type de montage est idéal pour les projets éducatifs, les voitures téléguidées, les robots autonomes et les systèmes de surveillance. Il offre un excellent point de départ pour comprendre la détection de proximité et l’intégration de capteurs avec des microcontrôleurs dans des applications robotiques et électroniques modernes.
Source: wikibooks.org | CC