Le fonctionnement de ce dispositif repose sur une méthode de détection par émission et réception de signaux infrarouges. Les diodes émettrices sont activées successivement, tandis que les phototransistors correspondants sont interrogés simultanément. Si un signal est renvoyé au phototransistor, cela indique que le faisceau lumineux émis par la diode a été réfléchi par un obstacle. Dans ce cas, le programme exécute une action spécifique, par exemple en déclenchant l’allumage d’une diode électroluminescente sur le panneau de contrôle. Cette approche offre une méthode fiable et réactive pour détecter la présence d’obstacles ou d’objets dans un environnement donné, ce qui peut être utilisé dans une variété d’applications, telles que la détection d’obstacles dans les robots autonomes ou les systèmes de sécurité.
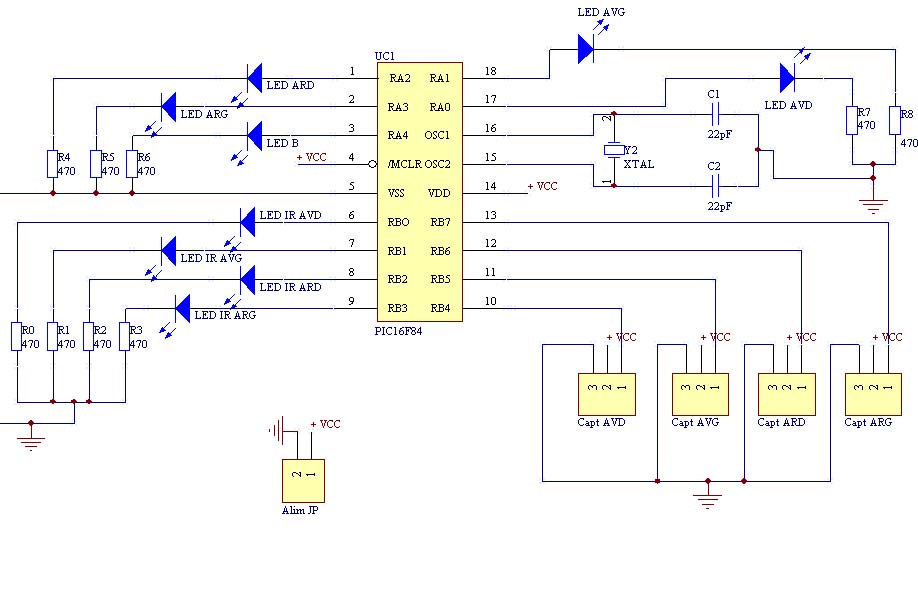
Les composants clés de ce système comprennent un microcontrôleur PIC 16F84, des diodes infrarouges émettrices, des phototransistors infrarouges récepteurs, ainsi que des composants passifs tels que des résistances et des condensateurs. Un quartz tournant à 4 MHz assure la synchronisation des opérations du microcontrôleur. Le programme embarqué dans le microcontrôleur gère le processus de détection et d’action en fonction des signaux reçus. Cette conception modulaire et bien définie permet une intégration aisée dans divers systèmes nécessitant une détection précise et réactive des obstacles ou des objets dans leur environnement.
Source: wikibooks.org | CC