La modulation de largeur d’impulsions
La modulation de largeur d’impulsions (MLI ; en anglais : Pulse Width Modulation, soit PWM), est une technique couramment utilisée pour synthétiser des signaux continus à l’aide de circuits à fonctionnement tout ou rien, ou plus généralement à états discrets.
Le principe général est qu’en appliquant une succession d’états discrets pendant des durées bien choisies, on peut obtenir en moyenne sur une certaine durée n’importe quelle valeur intermédiaire (voir exemple ci-après).
Applications
Les usages les plus fréquents sont :
* La conversion numérique-analogique
* Les amplificateurs de classe D, en audio
* Les alimentations à découpage, variateurs de vitesse, et plus généralement tous les dispositifs d’électronique de puissance utilisant des composants de type MOSFET, IGBT, GTO.
Il est aussi possible de faire de la transmission de données par cette méthode.
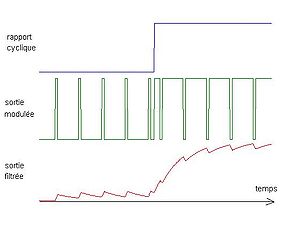
Exemple simple : un convertisseur numérique-analogique
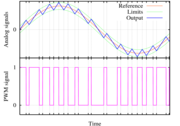
Le principe est de générer un signal logique (valant 0 ou 1), à fréquence fixe mais dont le rapport cyclique est contrôlé numériquement. La moyenne du signal de sortie est égale au rapport cyclique : il suffit donc de mettre un filtre passe-bas pour obtenir la valeur analogique recherchée.
On peut voir sur cet exemple les principales contraintes de la MLI :
* Il doit y avoir une fonction filtrage pour extraire le signal utile (ce filtre peut exister naturellement dans le système : condensateur de l’alimentation à découpage, inductance du moteur pour le variateur de vitesse, etc.) ;
* La bande passante est limitée par ce filtre ;
* La fréquence porteuse doit être significativement supérieure à la fréquence de coupure du filtre, pour que l’ondulation résiduelle soit faible.
Types de MLI
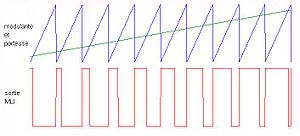
MLI « intersective »
C’est la plus classique. Elle consiste à comparer la modulante (le signal à synthétiser) à une porteuse généralement triangulaire. Le signal de sortie vaut 1 si la modulante est plus grande que la porteuse, 0 sinon ; le signal de sortie change donc d’état à chaque intersection de la modulante et de la porteuse.
Cette méthode se prête bien à une réalisation analogique : Il suffit d’un générateur triangle et d’un comparateur. Il existe de nombreux circuits intégrés dédiés.
On peut classifier les sous-types de plusieurs manières :
* Analogique ou numérique échantillonné, selon que la modulante et le comparateur sont en temps continu ou discret ;
* À porteuse triangulaire centrée ou en dent de scie (à gauche ou à droite) ;
* Asynchrone ou synchrone, selon que la modulante et la porteuse sont de fréquence exactement multiples ou non.
« Vecteur spatial »
La MLI dite space vector (vecteur spatial) est surtout applicable aux variateurs de vitesse triphasés sans neutre.
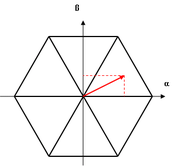
Elle consiste à considérer globalement le système triphasé, et à lui appliquer une transformée de Concordia pour se ramener dans le plan (Vα, Vβ). Le système triphasé de tensions à générer pour la durée d’échantillonnage en cours peut alors être représenté comme un unique vecteur dans ce plan (voir aussi commande vectorielle).
Ce vecteur n’est pas directement réalisable par les interrupteurs du variateur, mais on peut chercher les trois configurations les plus proches (situées sur les sommets et au centre de l’hexagone), et les appliquer successivement pendant une fraction adéquate de la période d’échantillonnage, de façon à obtenir en moyenne le vecteur recherché.
En modulation sinusoïdale, elle donne des résultats similaires à la MLI intersective à porteuse triangulaire centrée. Néanmoins, elle peut être plus facile à implanter dans un microcontrôleur, et, adjointe d’une harmonique 3, elle permet de maximiser la puissance disponible, ce qui justifie son usage.
MLI « précalculée »
Elle est surtout utilisée lorsque, du fait d’une fréquence porteuse faible, on a besoin d’optimiser le spectre du signal généré. Le motif du signal de sortie est prédéterminé (hors ligne) et stocké dans des tables qui sont ensuite relues en temps réel.
De fait, ces MLI sont toujours synchrones (la fréquence porteuse est exactement multiple de la fréquence de la modulante), condition nécessaire pour avoir un spectre harmonique constant.
En pratique, ce type de MLI ne peut être réalisé qu’en numérique.
Commande par hystérésis
Cette méthode consiste à élaborer le signal MLI directement à partir de la grandeur à contrôler, par des décisions de type tout ou rien.
Les avantages sont la très grande simplicité et le temps de réponse minimal aux perturbations. L’inconvénient majeur est l’absence de contrôle de la fréquence de commutation des transistors, ce qui rend délicat leur dimensionnement.
Principe de réalisation
En général, un logiciel tournant sur microcontrôleur calcule des signaux (voir Digital signal processor, ou DSP) MLI de commande a haute fréquence (jusqu’à environ 100kHz).
Ce microcontrôleur se trouve dans la partie numérique d’un circuit électronique. Ainsi commandé, le circuit suivant (généralement de puissance : MOSFET, IGBT) génère un signal électrique analogique de fréquence nettement inférieure au signal MLI mais d’une puissance nettement supérieure à l’étage numérique précédent. Ce signal analogique peut être sinusoïdal (50Hz, 220V) dans le cas d’un générateur de courant domestique à partir de batteries (convertisseur statique) mais il peut prendre n’importe quelle forme, comme par exemple celle d’un signal audio.
De façon simple, cette technique échange de la vitesse de traitement en numérique (un train continu, périodique d’impulsions binaires dont les largeurs sont finement calculées par un calculateur) contre de la précision en amplitude (analogique).
Source: wikipedia.org | CC