Le bruit rose
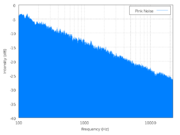
Le bruit rose est un signal aléatoire dont la densité spectrale de puissance décroît de 3 dB par octave. Sa densité spectrale de puissance tend donc vers l’infini pour les basses fréquences et vers zéro pour les hautes fréquences ; en conséquence, le niveau restera constant sur la plage de fréquences de n’importe quelle octave. Ce signal se rapproche plus de la sensibilité de l’oreille que le bruit blanc. Pour cette raison, le bruit rose est donc souvent utilisé dans l’univers audible pour calculer la réponse fréquentielle d’une chaîne de reproduction sonore. Il peut être aussi utilisé pour mesurer les caractéristiques des transducteurs électroacoustiques (microphone, haut-parleur, enceintes).
 Il sert également dans l’acoustique des salles et l’acoustique du bâtiment. Par exemple, un bruit rose est émis dans une salle via un haut-parleur et un microphone, situé dans la salle, enregistre le signal reçu. Le spectre mesuré permet de connaître les fréquences atténuées et de les corriger via un égaliseur.
Il sert également dans l’acoustique des salles et l’acoustique du bâtiment. Par exemple, un bruit rose est émis dans une salle via un haut-parleur et un microphone, situé dans la salle, enregistre le signal reçu. Le spectre mesuré permet de connaître les fréquences atténuées et de les corriger via un égaliseur.
Dans le bâtiment, la mesure in situ d’un isolement se fait par comparaison entre un bruit rose d’émission et le bruit mesuré dans la pièce de réception.
Source: wikipedia.org | CC